Options
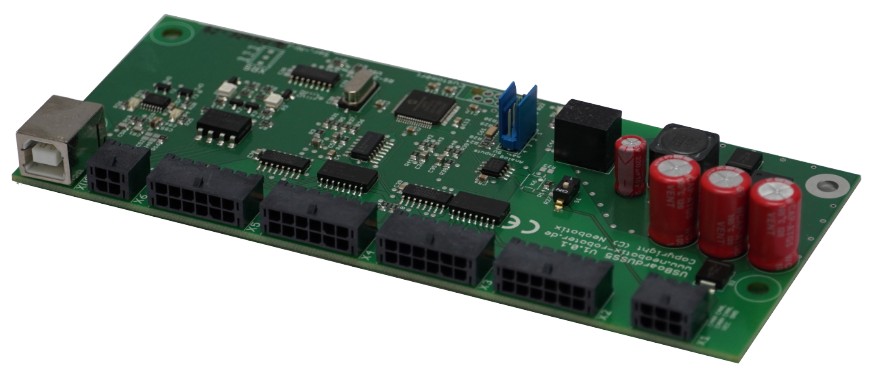
USBoard
The USBoard allows the evaluation of up to 16 ultrasonic sensors by the control software of the autonomous robot. This, for example, allows collisions with obstacles above the detection level of the laser scanners to be avoided.
All the USBoards can also be used as a stand-alone systems.
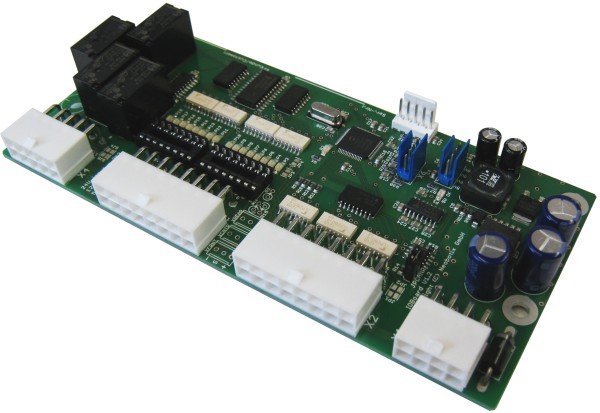
IOBoard
The IOBoard expands the possibilities of the mobile robot or mobile manipulator by providing 16 digital inputs, 12 digital outputs, 4 relay outputs and 4 analog inputs. All these connections can be freely assigned and controlled by the AMR control software.

Laser scanner - nanoScan3
The nanoScan3 safety laser scanner from Sick is the default scanner in the ROX series of autonomous mobile robots and the mobile manipulators EMROX. It offers impressive features in a tiny package. The nanoScan3 can also be integrated into our other robot models or added to monitor additional safety fields.

Laser scanner - S300
All our robots are equipped with a S300 Expert (2 m) laser scanner from Sick as standard. On many models, a second laser scanner can be added as an option to increase the field of view or even provide complete coverage around the robot.
Protective fields can be defined in the field of view of the laser scanners. As soon as an obstacle is detected in these protective fields, the robot switches to the safe stop.

Laser scanner - microScan3
The microScan3 from Sick is the modern successor of the proven S300. It has a longer range and sets new standards with regard to measurement data quality.
Unlike the S300, the microScan3 must always be combined with a Flexi Soft safety controller.

Safety Controller Flexi Soft
For larger and more complex robots, especially for mobile manipulators, it makes sense to use a safety controller such as the Flexi Soft from Sick. Almost any safety component can be connected to the Flexi Soft. Their interaction can then be freely programmed and precisely adapted to the respective application. In many applications, safe operation of autonomous robots is otherwise not possible.