ROX-Diff
ROX Platform With Central Differential Drive
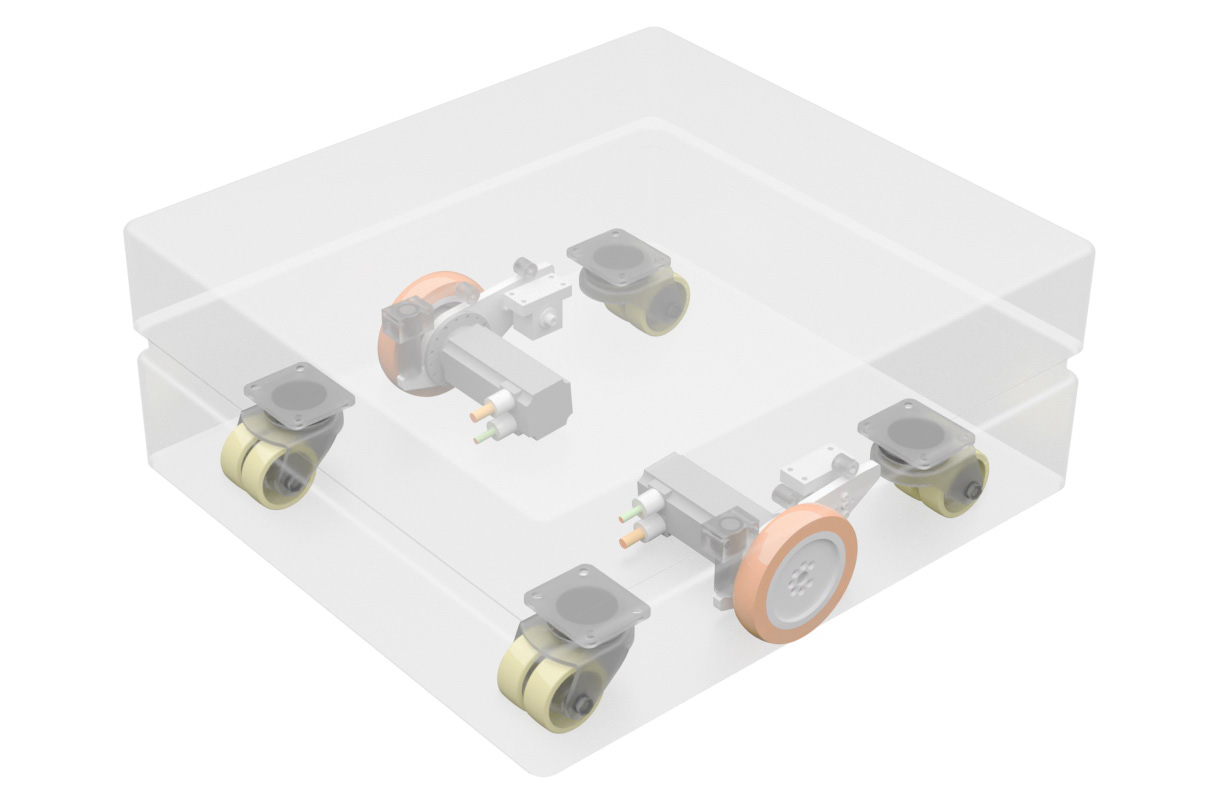
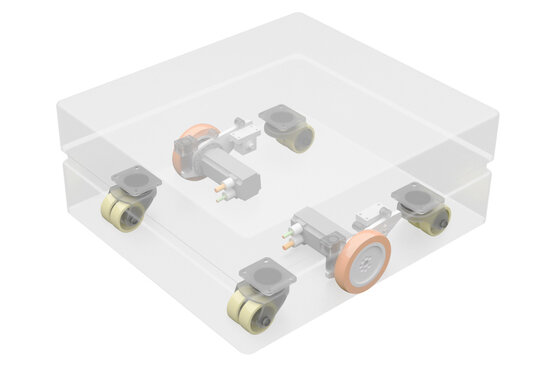
The central differential drive is one of the most common kinematic configurations in AMRs, along with the three-wheel setup. It consists of two independently controlled drive wheels, which are mounted on the left and right corners of the platform center. The actual load is supported by passive steering casters, one at each corner of the platform in the case of the ROX.
This configuration offers several advantages:
- It is a cost-effective and energy-efficient drive system.
- The ability to rotate in place provides the robot with high mobility, even in confined spaces.
- Thanks to its suspension system, the robot can easily navigate small steps and gaps and can handle most industrial floor surfaces with ease.
On the other hand this design comes with very few limitations:
ROX-Diff
Basic configuration
Description
Turnkey system: 2x motors, 1x Sick S300 expert scanner, sealed lead battery 24V/50Ah, wireless joystick, manual charger, on-board computer (Intel i5, 8 GB RAM, >200 GB SSD, WLAN), ROS, documentation, CE conformity declaration
1 day training
Description
In Heilbronn for up to 3 persons
inclusive catering
inclusive catering
Basic support
Description
3 month support (Telefon/E-Mail)
Automatic charging station
i7 on-board computer
Description
Intel Core i7, 16 GB RAM, 400+ GB SSD
IOBoard
Second laser scanner
Description
Extended support
Description
Additional 6 months support
by telephone/e-mail/update
by telephone/e-mail/update