The Robot Operating System 2
ROS, from the date of its release, has been ubiquitously deployed in a variety of applications ranging from space robots to educational robots. Neobotix is a huge supporter of open-source packages and for several years now, ROS has been the integral core component of all our products. All our ROS based products work seamlessly and have played a major part both in industries and as well as in research contributions. ROS 2 is the next leap for the ROS Community, that provides various advantages compared to its predecessor ROS. Along with the community, we have already migrated all our packages to ROS 2.
We currently support the ROS 2 distributions Jazzy.
Some of the advantages that ROS 2 provide
- Lifecycle nodes, that allow you to set different states for the process or the application that is intended.
- Nodes are not dependent on ROS Master anymore, rather each node has the capability to find the other nodes.
- Unlike ROS, ROS 2 can be installed on Ubuntu, MacOS and Windows 10.
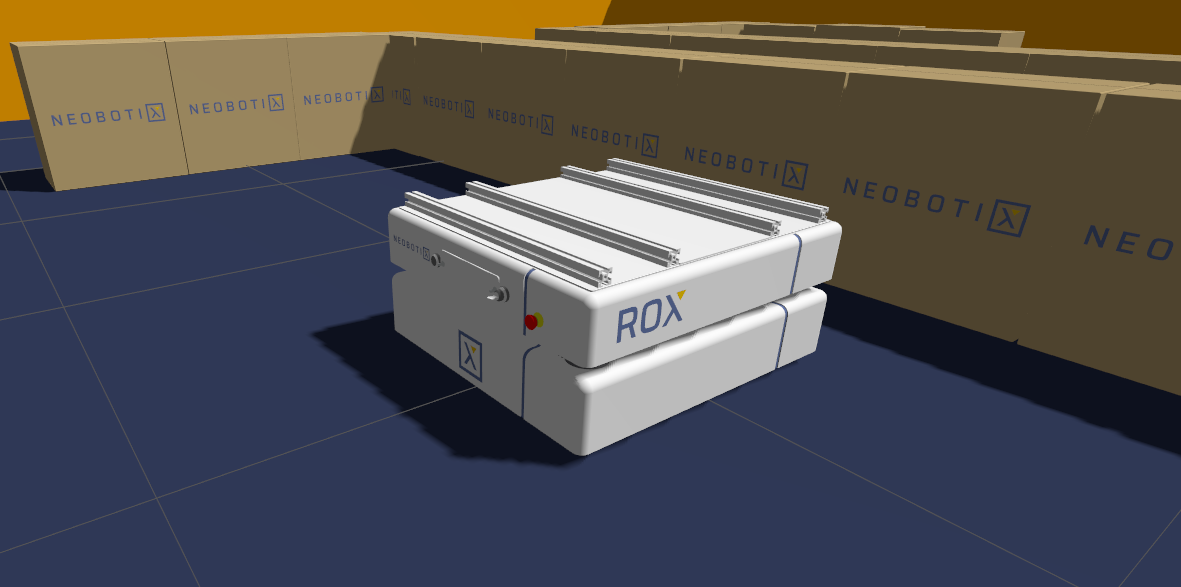
Simulation
Following the immense success of our neo_simulation package in both ROS 1 and ROS 2, we now offer full support for all our mobile robots and mobile manipulators in Modern Gazebo. Featuring pre-built and customizable environments, this tool allows users to focus purely on rapid prototyping, algorithm testing, and expanding their robotics expertise.
Now, all simulation components reside closer to the robot packages, enabling faster parameter transfer from the simulation to the real robot (and vice versa) for debugging.

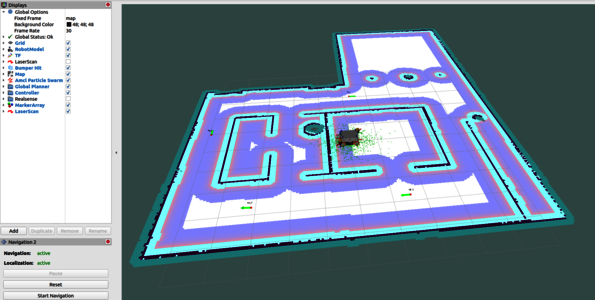
Navigation
We have also integrated the all new navigation-stack Nav 2 with our robots, enabling you to deploy new features such as the behaviour trees and setting mutiple goal location for your robot. Apart from that, Nav 2 provides with all new planners and controllers such as hybrid planner, SMAC Planner and the DWB Controller.

Complete ROS 2 installation and configuration. Gets your standard, unmodified mobile robots running straight out of the box, complete with the ROS 2 Distro and Ubuntu installation of your choice (that we support) and other added benefits.

Seamless integration for standard mobile manipulators with Universal Robot (UR) arms. Featuring fully installed ROS 2 packages for your UR arms, this setup includes added benefits to ensure your unmodified system communicates perfectly with the on-board PC of the mobile manipulator and operates smoothly from day one.

This package features the latest NBX Lemma GUI, allowing you to control your mobile robot from any device. This product provides the essential ROS 2 package modifications required for your customized platforms, complete with your choice of supported ROS 2 Distro and Ubuntu installation, plus various other benefits.

We update our standard ROS 2 packages specifically for your custom mobile manipulators. This ensures your unique system runs straight out of the box, backed by end-to-end simulation support and other premium benefits including the NBX Lemma GUI.
Which AMR Software to Use?
When to use ROS 2?
If you need full ownership and control of the software stack.
If the application requires novel capabilities (latest AI, complex manipulation, custom sensors).
If you need to integrate hardware from multiple different vendors (interoperability) into a single system.
When the goal is innovation and research, and you require access to the state-of-the-art open source ecosystem.
When is PlatformPilot better suited?
If the robot is to work productively in the long term, especially if the application is to be expanded in the future.
When proven functions and components are to be combined to form a new whole.
When reliability and professional support are paramount.
When not every detail needs to be accessible and modifiable.