ROX-Argo
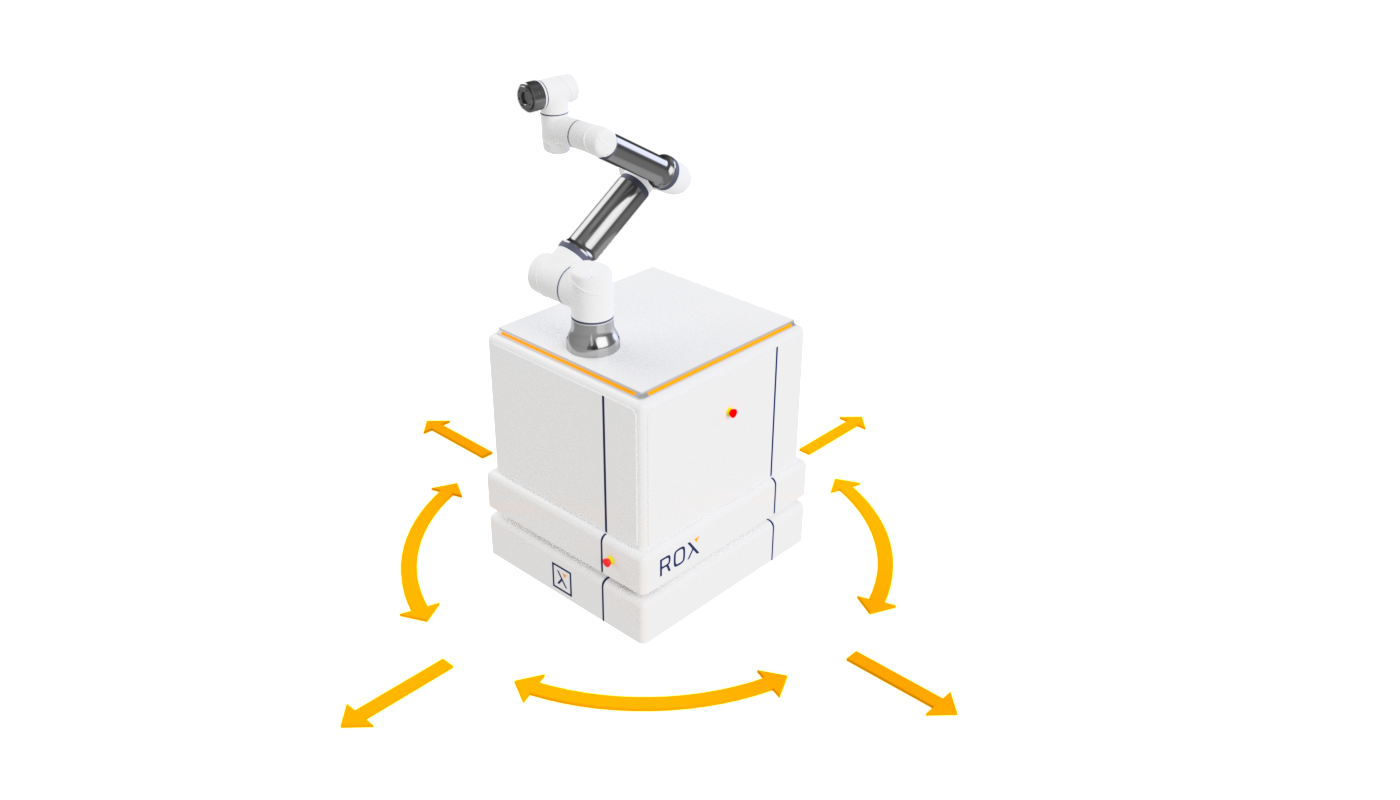
Omnidirectional ROX Platform With Powerful ArgoDrives
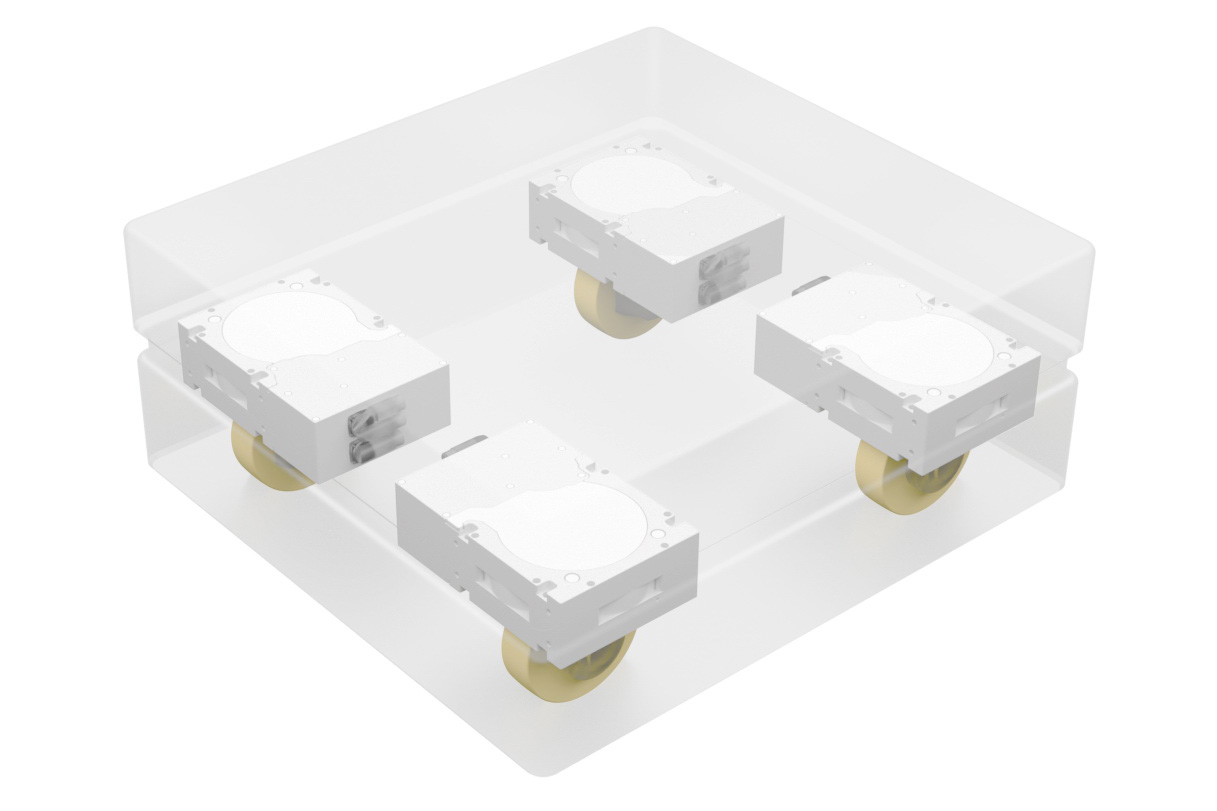
The ROX-Argo platform features the omnidirectional ROX design with powerful ArgoDrive ArgoDrives. This platform design provides impressive maneuverability in all directions, making it suitable for environments with narrow spaces. It also allows for reaching target positions directly without the need for additional maneuvering. This feature proves to be particularly advantageous when the robot arm of a mobile manipulator needs to be moved sideways or to reach positions beyond its original reach.
Using the ArgoDrives offers several advantages:
- Impressive payload with compact dimensions.
- The special kinematics of the ArgoDrives offer high speed and shortest reaction times with an impressive efficiency.
- Since all wheels are actively steered and driven at all times, gaps, unevenness, and slight slippage are not a problem.
This kinematics comes with only very few limitations:
- Compared to the omnidirectional Mecanum wheels of the ROX-Meca the ArgoDrives are more expensive.
- In the long run, the MPO-700 copes better with very dusty or dirty floors.

ROX-Argo
Basic configuration
Description
Turnkey system: 2x motors, 1x Sick S300 expert scanner, sealed lead battery 24V/50Ah, wireless joystick, manual charger, on-board computer (Intel i5, 8 GB RAM, >200 GB SSD, WLAN), ROS, documentation, CE conformity declaration
1 day training
Description
In Heilbronn for up to 3 persons
inclusive catering
inclusive catering
Basic support
Description
3 month support (Telefon/E-Mail)
Automatic charging station
i7 on-board computer
Description
Intel Core i7, 16 GB RAM, 400+ GB SSD
IOBoard
Second laser scanner
Description
Extended support
Description
Additional 6 months support
by telephone/e-mail/update
by telephone/e-mail/update