Neobotix PlatformPilot
The Neobotix PlatformPilot is an all-in-one solution for the realization of your automation requirements. As the pilot of the robot platform, it turns mobile robots into Autonomous Mobile Robots (AMR) and steers them safely and quickly to their destination. To that end, it combines the smart control of actuators with the processing of sensor data and provides navigation and localization for many transport systems. It provides many additional modules to automate complex processes for day-to-day industrial use.
To give you an idea of PlatformPIlot's capabilities, we have put together a teaser video on our YouTube Channel.
Would you like an offer or more information?
Give us a call or contact us by mail.

Who Can Benefit From PlatformPilot?
With PlatformPilot, both end users and integrators of automation applications in the field of intralogistics can leverage the full capabilities of their hardware, as well as researchers can integrate and test individual approaches. Together with (Neobotix) robot platforms, for example, material can be picked up and automatically transported or integrated robot arms can be brought into position. The PlatformPilot-GUI is optimized for commissioning engineers and machine setters and allows the steps required for setup to be carried out in a structured manner and in a short time.
What Is So Special About PlatformPilot?
The special feature is the modular design. PlatformPilot can control and evaluate many different kinematics, drive systems and sensors. All modules together result in a holistic system for control and navigation. It is easy to replace or improve individual modules without endangering or fundamentally changing the overall system.
The Neobotix Roadmap Concept
The well-proven concept of Neobotix Roadmaps makes it easier to switch from previous systems. Classic lane-guided automated guided vehicles (AGVs) are often inflexible in route management. Lane restructuring can only be managed with cost-intensive changes in the environment.
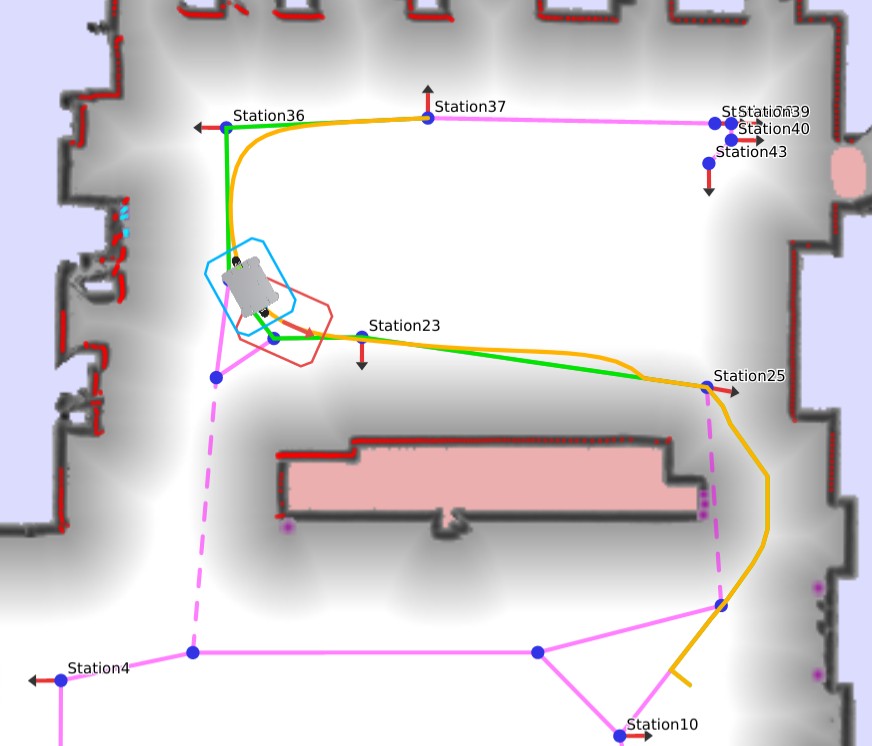
In Neobotix PlatformPilot, this process is virtualized, which means that the lanes can be dynamically created and edited in a graphical interface as paths based on an environment map. In addition, properties can be set for each path segment to customize the driving behavior in detail. In this way, speed limits, avoidance boundaries, angles or additional actions can be defined. The driving behavior is thus always predictable and reproducible - essential for reliable operation times.

This is PlatformPilot's control kernel, which runs directly on the mobile robot's on-board computer.

The graphical user interface allows interaction with the robot. A cross-platform desktop application with a wide range of functions is available for setup, and the built-in web interface is suitable for a quick overview.

The PlatformPilot Editor is an intuitive yet powerful programming tool that provides access to all PlatformPilot functions and is integrated into the graphical user interface.

As you would expect, PlatformPilot also comes with an integrated help function, extensive online documentation, many video tutorials and, if desired, personal training sessions.

PlatformPilot-Tower manages traffic when several autonomous mobile robots are moving in the same area. The Tower comes in several flavours which intervene, to varying degrees, in the route planning of the robots, preventing traffic jams and clearing blockades.
Which AMR Software to Use?
When is PlatformPilot ideal?
If the robot is to work productively in the long term, especially if the application is to be expanded in the future.
When proven functions and components are to be combined to form a new whole.
When reliability and professional support are paramount.
When not every detail needs to be accessible and modifiable.
When to choose ROS 2?
If you need full ownership and control of the software stack.
If the application requires novel capabilities (latest AI, complex manipulation, custom sensors).
If you need to integrate hardware from multiple different vendors (interoperability) into a single system.
When the goal is innovation and research, and you require access to the state-of-the-art open source ecosystem.