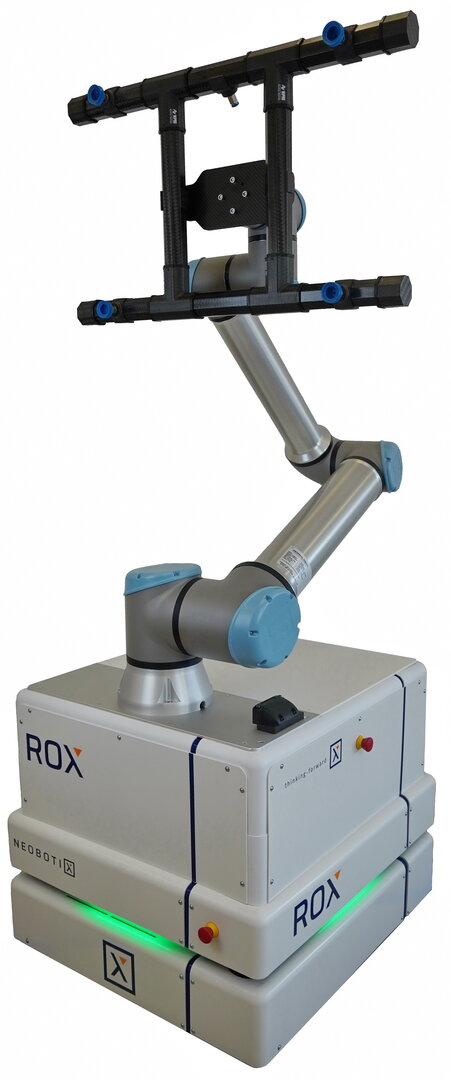
Mobile Manipulator EMROX
The EMROX mobile manipulator offers the advantage of adding a cobot arm to any mobile platform of the ROX generation, resulting in a wide range of combinations suitable for almost all applications. The cobot arms from Universal Robots, and other manufacturers can be combined with all classic and omnidirectional kinematics. Furthermore, our options are customizable and can be easily tailored to meet your specific requirements.
For research and development, both the arm and the platform can be controlled using the open-source ROS 2 framework. For industrial application, our professional software PlatformPilot is available for controlling the platform.
You would like to order a quote or a robot? We are looking forward to your inquiry!

FEATURES
Flexible mobility: If the arm only needs to be moved quickly back and forth between its workstations, then the Diff and Trike kinematics are ideal. For complex workflows or confined environments, the omnidirectional variants Argo and Meca are the better choice.
All in one: thanks to ROS 2, arm and platform can be controlled by a common robot controller, which opens up completely new possibilities in research and development. For productive and industrial tasks, the combination of PlatformPilot and the manufacturer's own arm controller is more suitable.
Customizable: The EMROX mobile manipulator can be adapted to a wide range of requirements, including unique solutions.
Components
Sensors
2 x Safety laser scanner, 360° field of view
Battery
AGM (48 V, 26-78 Ah, cost-efficient) or
LiFePO4 (48 V, 21-63 Ah, rapid charging capable)
Safety
Sick Flexi Soft EFI-pro
programmable and extendable
Options
Charging station, wireless emergency stop, IOBoard, ...